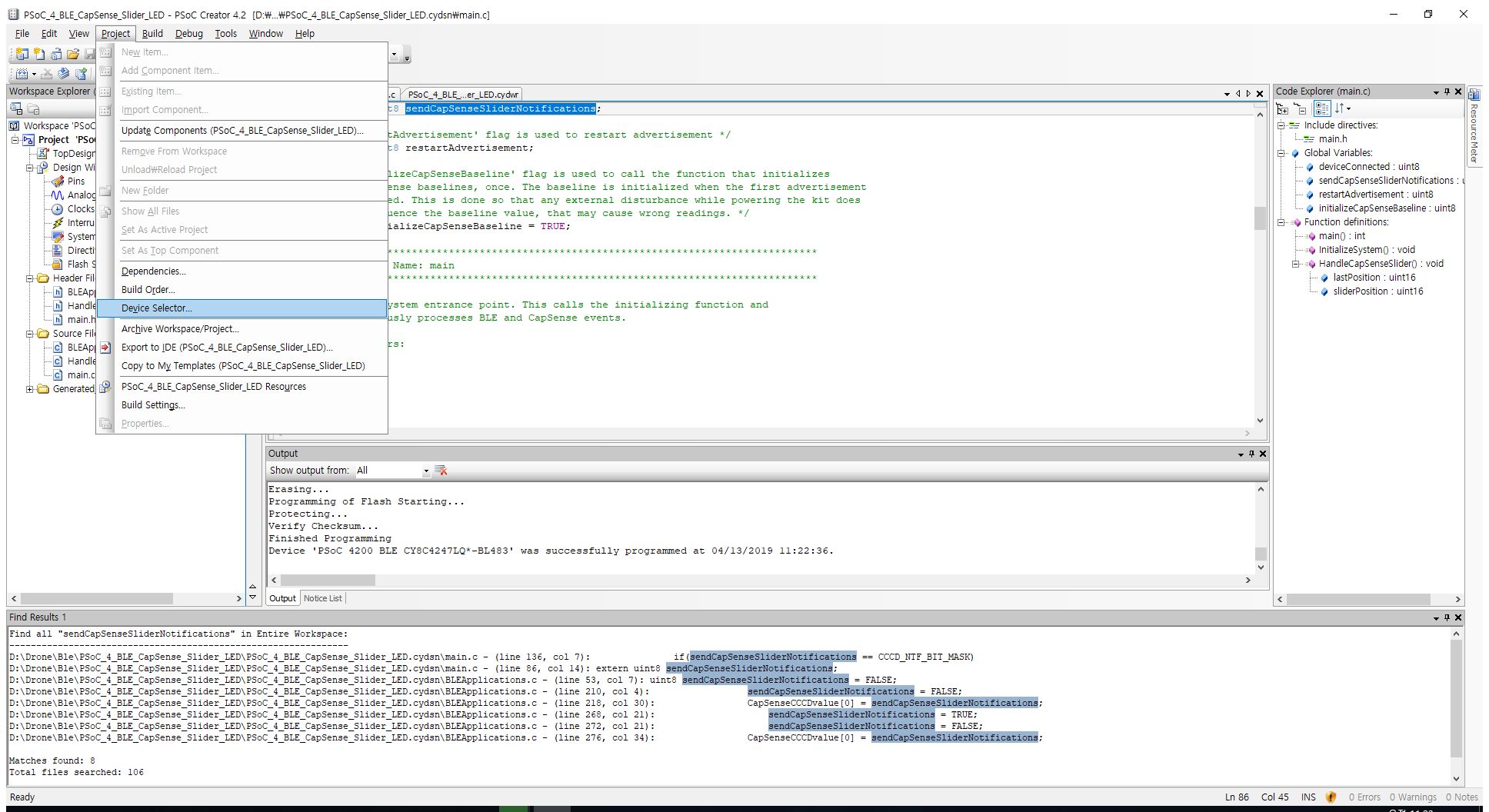
PSOC의 단점이자 장점 PLD 기반이기에 CPLD나 FPGA 제품처럼 디바이스를 변경하여 사용할 수 있는 부분입니다. 초기에 판매했던 개발보드와 나중에 판매하는 개발보드가 이름은 동일한데 칩이 변경되거나 기제품을 단종시켜버려서 넘어가야 하는 경우가 있어 난처할 때가 있습니다. 그럴때 디바이스를 아래와 같이 변경하여 사용하면 됩니다. 변경되는 화면이 일반 펌웨어 엔지니어들에게는 조금 생소합니다. Keil이나 IAR 등에서도 IC를 변경하여 설정하고 사용하는 것이 있지만 그 선택하는 부분이 알테라의 디바이스 변경과 더 비슷한 느낌입니다. 사용하시는 분들은 당연히 아시겠지만 PLD와 MCU의 조합이기 때문입니다. 요즘 나오는 징크같은 칩을 보면 PSOC과 비슷하다는(사용법이 아닌 방식이) 느낌을 느낄 수 있..