void PWM2_Init(u32 a_nPrescaler, u32 a_nPeriod, u8 a_nDuty)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
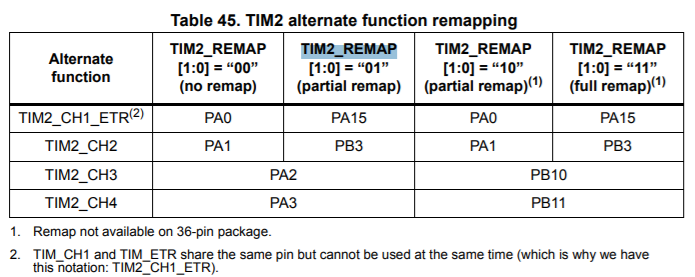
/* TIM2 Remap */
GPIO_PinRemapConfig (AFIO_MAPR_TIM2_REMAP, ENABLE);
//GPIO_PinRemapConfig (AFIO_MAPR_TIM2_REMAP_0, ENABLE);
//GPIO_PinRemapConfig (AFIO_MAPR_TIM2_REMAP_1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* GPIOB Configuration:TIM1 Channel 4 alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = a_nPeriod - 1;
TIM_TimeBaseStructure.TIM_Prescaler = a_nPrescaler - 1;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel 1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_Pulse = a_nDuty;//a_nDuty;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
/* TIM1 enable counter */
TIM_Cmd(TIM2, ENABLE);
TIM_CtrlPWMOutputs(TIM2, ENABLE);
}
'초보의 아웅다웅 설계하기 > STM32' 카테고리의 다른 글
| STM32F DAC, Digital POT (0) | 2022.02.03 |
|---|---|
| HMAC-SHA256(KISA) (0) | 2021.12.14 |
| SOFT SPI - nRF24L01/STM32F103 (0) | 2021.12.12 |
| nRF24L01 + STM32L073 (0) | 2021.12.05 |
| STM32F103 Unique ID Read (0) | 2021.06.27 |